




KWR63 63mm 6 Axis Force Torque Load Cell For High Accuracy
Description

- The Kunwei Multi-Axis Force/Torque Sensor system measures all six components of force and torque. It consists of a transducer, interface electronics and cabling.
- We have excellent sales and engineer team, they will be combined with their own service experience, from the understanding of customer product usage scenarios, installation location and installation surface size, to know the sensor by the power range, equipment support communication protocol and other aspects, to provide customers with matching products.
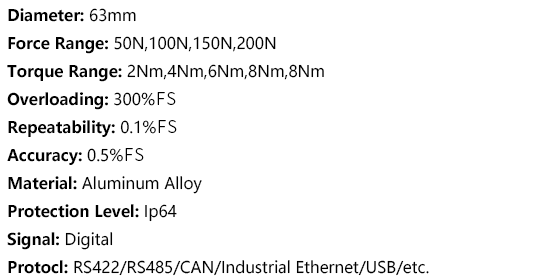
- The KWR63 series is a compact six-axis force sensor with a diameter of 63 mm and a height of 20 mm, which is widely used at the end of small collaborative robots. The sensor self outputs digital signal (RS422, RS485), if you need other communication protocols, it could be equipped with converter box. Before using, the range of the required measuring force should be determined in order to select the suitable sensor. If the range cannot be determined, the sensor with the largest range should be selected to determine the range, and then the appropriate sensor should be selected.
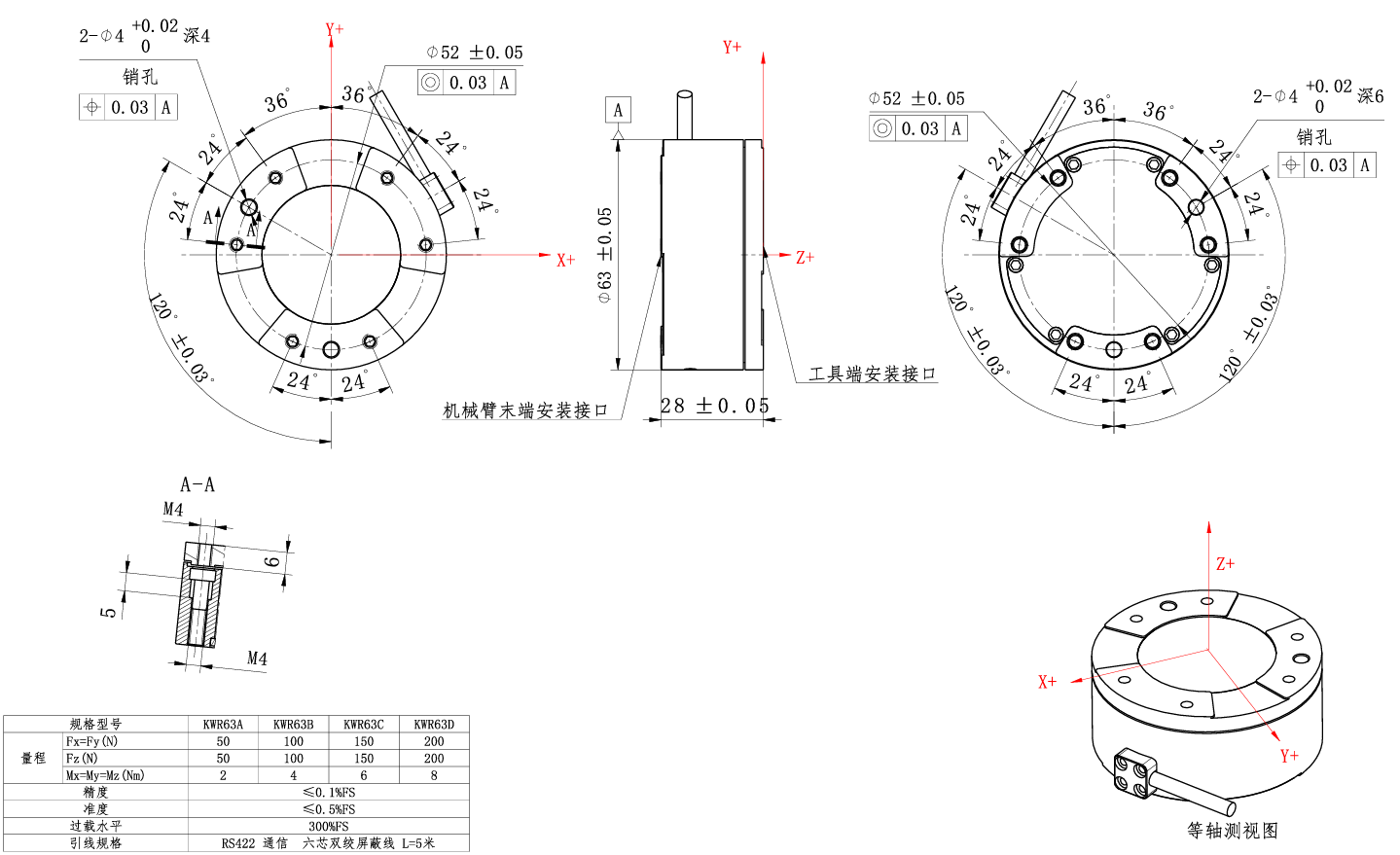
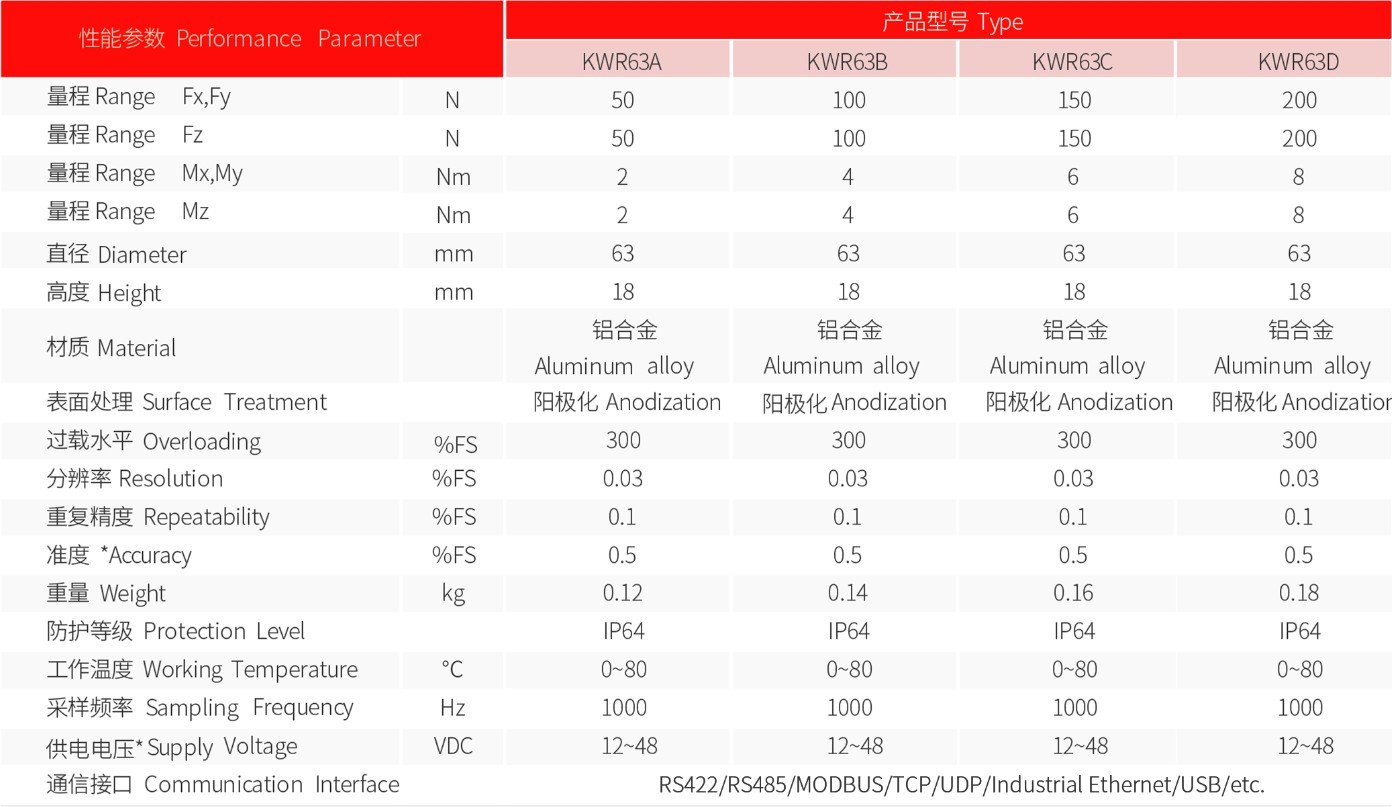
Model of KWR63
Automated packing is a market dominated by vision systems, but force and torque sensing robots are capable of tight-tolerance packing and packing of fragile materials. The additional data provided by the sensor allows the robot to detect the bottom and sides of the packaging, offering greater programming flexibility and repeatability. For example, parts could be reliably placed in a thin-walled box that changes shape or shifts position as parts are added to it.
A robot equipped with a six-axis sensor could be in service tending a computer numerical control (CNC) milling machine. Parts could be placed on a tray together, from billet stock to finished parts, and the robot could run the correct milling operation on a given part based on the sensed weight—as the weight changes to a specific value with each subsequent cutting operation. This hypothetical example demonstrates the flexibility and repeatability afforded by force torque sensor-enabled robots.












