




KWR60N49 Customize Static 60mm 49Nm RS485 Torque Sensor for Robot Joint

Description

The design of KWR60N49 torque sensor is based on the principle of resistance strain measurement. Finite element analysis software was used for simulation calculation during the preliminary structural design. The software accurately captures the internal stress and strain distribution of the sensor, such as stress concentration in sensitive areas. Based on this characteristic, we have finely optimized the structure of the joint torque sensor and conducted simulation analysis on the optimized data. Through repeated iterations and continuous optimization during actual product molding, we have ultimately created a sensor product that combines excellent performance and exquisite appearance.
In the simulation calculation process, we will simulate complex working conditions of sensors, obtain high-resolution data, control risks and safety, and optimize parameter sensitivity. Complex working condition simulation includes extreme condition analysis and multi physics field coupling, combined with interdisciplinary effects such as mechanics, thermodynamics, and electromagnetic fields, to comprehensively evaluate performance, such as the influence of temperature on the elastic modulus of materials; High resolution data acquisition includes local detail analysis and dynamic characteristic prediction, analyzing the response to transient force values, such as vibration characteristics under impact loads, and optimizing the measurement accuracy of sensor dynamics; Risk control and safety include failure prediction and safety boundary verification. By simulating scenarios such as overload and fatigue cycles, potential failure risks are predicted, such as plastic deformation and crack initiation of elastic materials. The theoretical limit load of sensors is determined to avoid accidental damage and sensitivity analysis in actual testing. Parameter sensitivity and optimization include quantifying the impact weights of different parameters on performance, such as material thickness and slot shape, clarifying optimization directions, and combining algorithms to automatically generate lightweight structures with high stiffness and low weight, thereby improving the energy efficiency ratio of sensors.
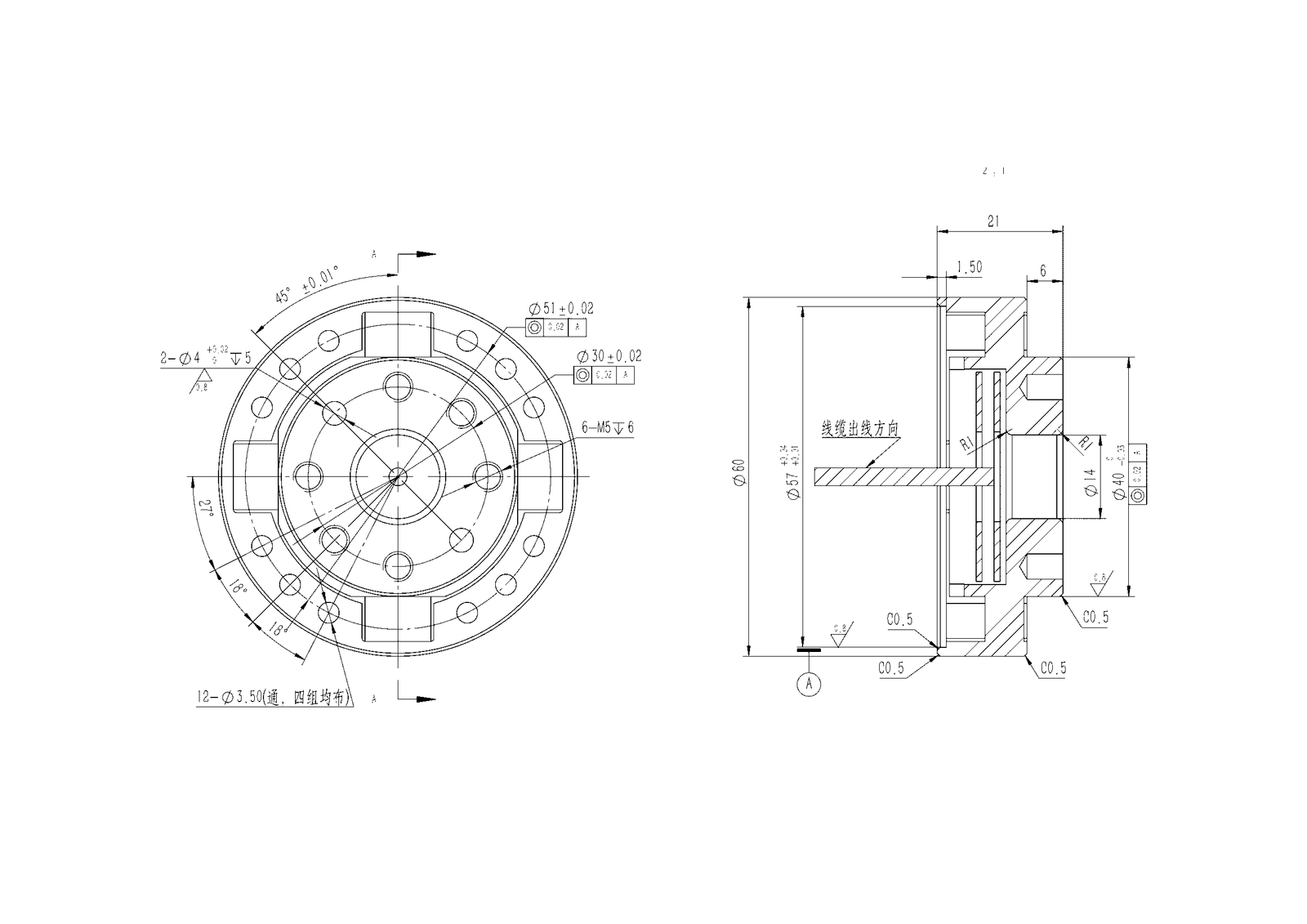
Model of KWR60N49















