Specifications
| Mechanical parameters | Electrical parameters | ||
| maximum speed | 6000 rpm | Operating Voltage | 10-30Vdc (5Vdc can be customized) |
| Spindle load | Axial 40N, Radial 100N | current consumption | < 50mA (24Vdc) no load |
| impact resistance | 1000m/s²(6ms), equal to 100g | output signal | CAN 2.0B protocol standard frame or extended frame |
| Anti-vibration | 200m/s²(10-2000Hz), equal to 20g | Linear resolution | 1/4096FS-65536FS |
| Allow axial play | ±1.5mm | Maximum working laps | 4096 laps (256 laps/64 laps optional) |
| Allow radial runout | ±0.2mm | Repeatability | Less than 2Bit |
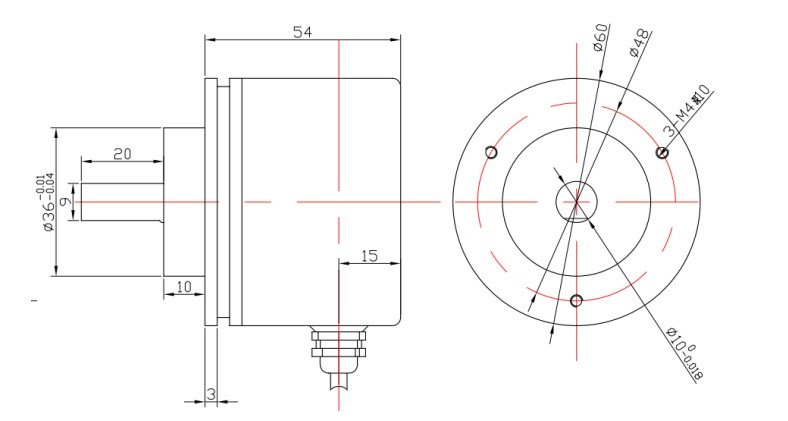
| external structure | 60mm OD, solid shaft, blind hole shaft | Operating temperature | -40℃~85℃ |
| Connection Type | 8-core shielded cable or aviation plug | Storage temperature | -40℃~85℃ |
Wiring diagram
| Function | Vcc | GND | RS485A(parameter setting) | RS485B (parameter setting) | CAN H | CAN L | direction | shield |
| colour | Brown | White | green | yellow | pink | black | blue | Net (thick red) |
Note: 1. Use of direction line (blue)
Connect the blue wire to a high level (that is, the encoder power supply is positive), and the encoder output value is counterclockwise (CCW).
Connect the blue line to low level (or leave it in the air), the encoder output value is clockwise (CW)
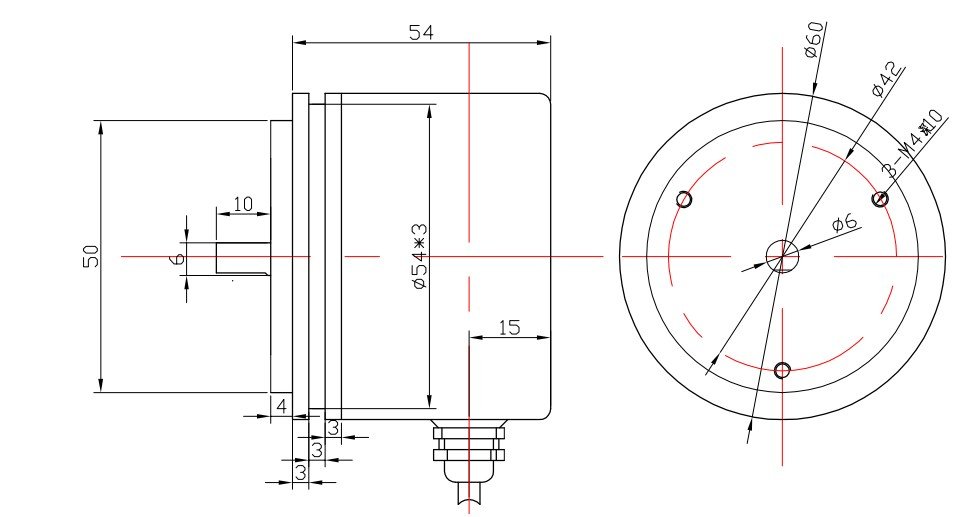
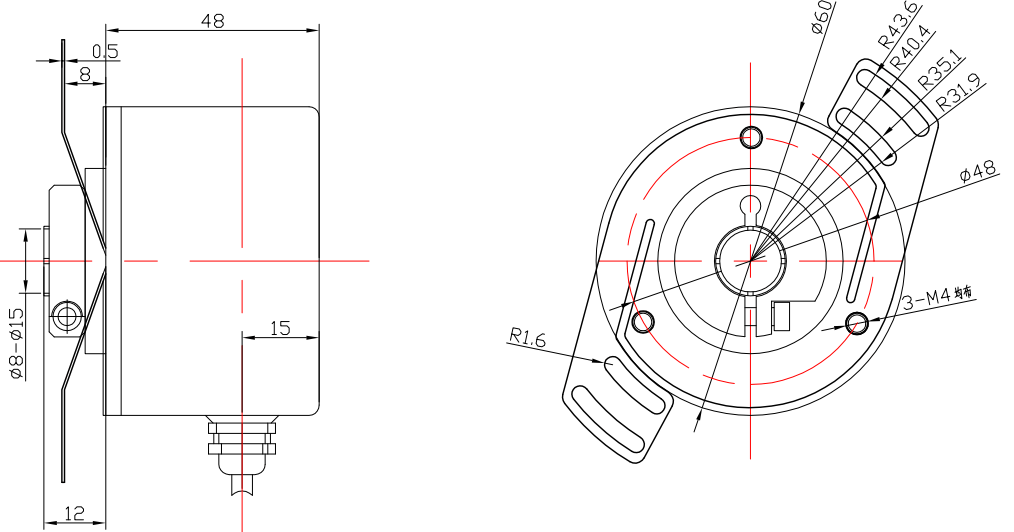
Mechanical dimension drawing
Clamping synchro flange (optional for cable output or plug output)
Synchronous flange/servo flange (cable output or plug output optional)
Blind Hole/Half Through Hole Flange (Cable output or plug output optional)
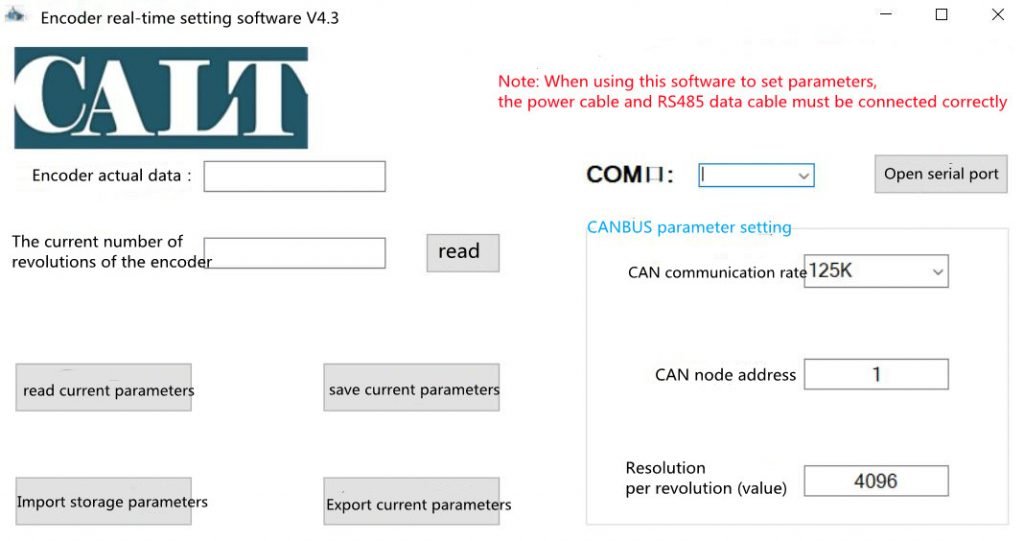
Absolute encoder parameter setting
The encoder is to set the communication frequency, address and resolution of CAN through our company’s special RS485 communication setting software.
The baud rate of RS485 communication is fixed at 115200.
Frame format: 8 data bits, 1 stop bit, no parity, no control flow
For example: