Baud Rate: 4800bps 9600bps 19200bps 38400bps 115200bps.
Frame format: 8 data bits, 1 stop bit, no parity, no flow control.
The parameter of encoders is set by software instruction.
When the encoder is in active mode, that is the encoder automatically sends data to the host. Data length
is 16 hexadecimal ASCII code format is: XAB> ± DATA  , as follow:
, as follow:
Wherein, “X” is the leading letters,”>” is delimiters, “±” is the sign bit; “DATA” is the data, ASCII format, 10,
from 0 to 9 constitute the range of -9,999,999,999 ~ +9,999,999,999. “” is carriage return (0D).
Instance:
1: Read data:
Host send: D + address + 0D
Encoder reply: X + address +> + match bit + data bit + 0D
Example:
Host send: 44 30 31 0D (when the encoder address is 01)
Encoder back: 58 30 31 3E 2B 30 30 30 30 30 30 30 31 32 33 0D
2: Encoder reset command:
Host send: D + address + L + M + sum check + 0D
Encoder reply: X + address + l + m + sum check + 0D
Example:
Host send: 44 30 31 4C 4D sum check 0D (when the encoder address is 01)
Encoder reply: 58 30 31 6C 4D sum check 0D (reset current position)
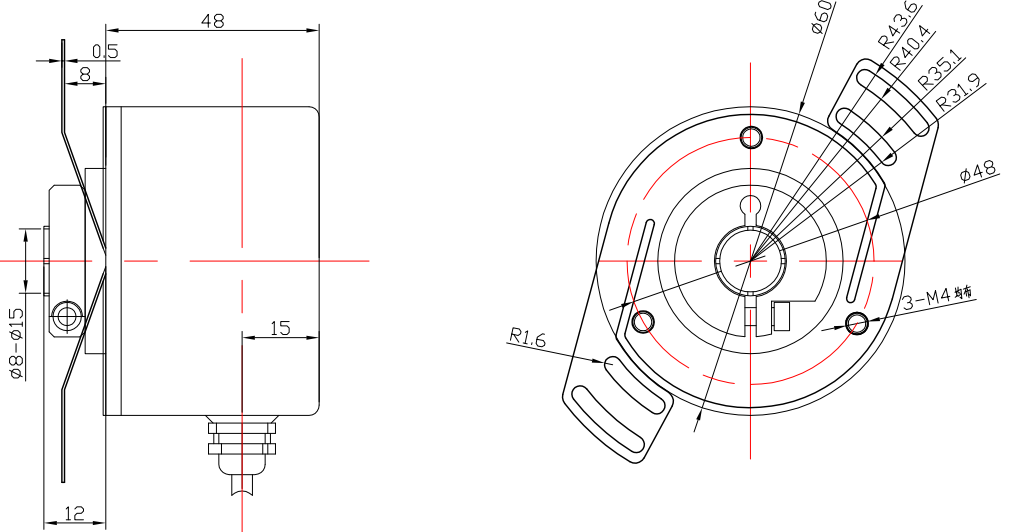
Clamping & synchro flange(default)
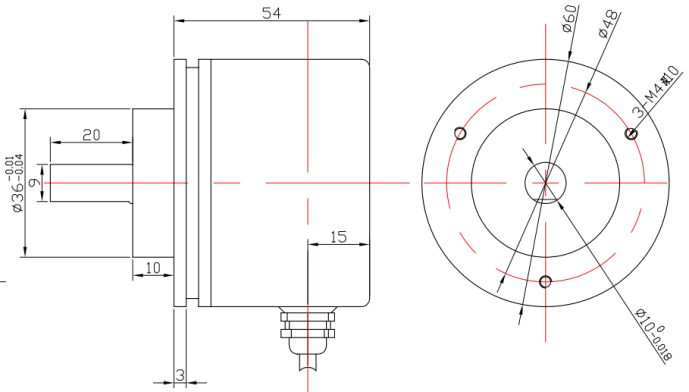
synchro flange
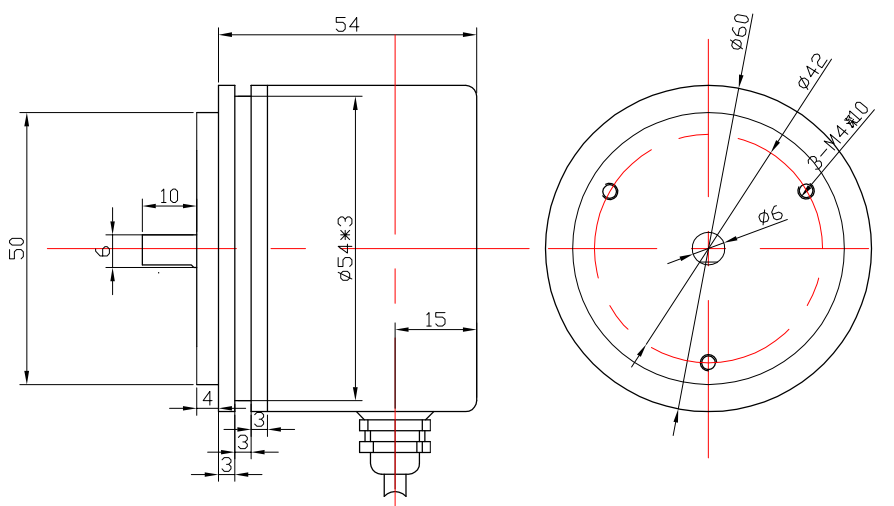
Blind hollow shaft